Autonomous Vehicles and Transportation
Security in autonomous vehicles and transportation is an arising research focus of SPQR. By studying autonomous vehicles' susceptibility to various physical attacks and proposing corresponding mitigations, we contribute to the autonomous vehicles industry and help ensure the safety of passengers in future transportation systems.
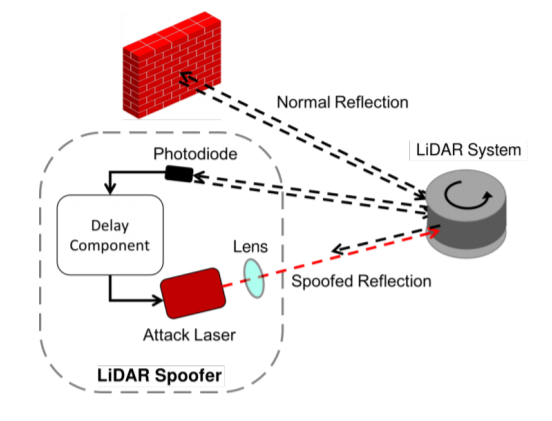
Adversarial Sensor Attack On Lidar-based Perception In Autonomous Driving.
In this work, we perform the first security study of LiDAR-based perception in Autonomous Vehicle settings. We consider LiDAR spoofing attacks as the threat model and set the attack goal as spoofing obstacles close to the front of a victim AV. We find that blindly applying LiDAR spoofing is insufficient to achieve this goal due to the machine learning-based object detection process. Thus, we then explore the possibility of strategically controlling the spoofed attack to fool the machine learning model. Utilizing that, we construct and evaluate two attack scenarios that may damage road safety and mobility.